A console connection to the PXS is needed to update software using XMODEM or YMODEM.
To load the software onto the PXS, at the RedBoot prompt, enter:
RedBoot> load -r -m [xmodem|ymodem]
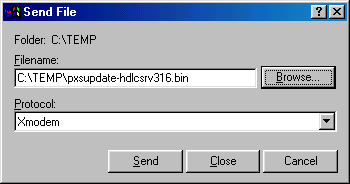
In the HyperTerminal session that is running the console connection with the PXS, select Transfer → Send File... to bring up the Send File dialog:
Browse to the directory that contains the software you want to download and
select either Xmodem or Ymodem as the protocol. Click
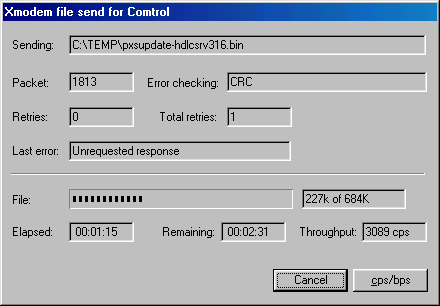
the button. The download should begin. During
the download, a window will be displayed that looks similar to this:
After a successful load, the terminal emulator screen will look similar to the following:
RedBoot> load -r -m xmodem CCRaw load done: 386304 bytes read Address range: 00000000-0005e500, Entry point: 00000000, xModem - CRC mode, 3019(SOH)/0(STX)/0(CAN) packets,6 retries RedBoot>
In order to see output on the asynchronous port during the update, execute the
async enable command. Then, to complete the update, run the update
program by executing the go command. the terminal emulator screen
will look similar to the following:
RedBoot> async enable RedBoot> go eCos: Starting pxsupdate version 1.01. Starting flash update of 'hdlcsrv'... 'hdlcsrv' exists in the file system. Deleting hdlcsrv... 'hdlcsrv' deleted. Creating 'hdlcsrv'... 'hdlcsrv' created at 0x05030000 (438208 bytes). Flash update of 'hdlcsrv' completed. Advanced Relay Corporation LayGO PXS - Protocol eXchange Server LayGO PXS Boot Version 3.18 RedBoot(tm) Debug Environment - Built 16:19:54, Apr 1 2004 Portions Copyright (c) 2000, Red Hat, Inc. Portions Copyright (c) 2001, Comtrol Corp. Portions Copyright (c) 2003, Advanced Relay Corp. RedBoot> async disable
After the update is complete, execute the async disable command.